




01

Высокоточный МЭМС Датчик Угла Наклона Девятиосевого Акселерометра
Использование передовой технологии цифровой фильтрации позволяет значительно снизить уровень шума при измерениях и повысить точность, обеспечивая получение точных данных.
Революционное решение проблемы ориентации с динамической фильтрацией Калмана обеспечивает точную точность в динамических условиях. Потрясающая точность измерения ориентации 0,001°, превосходящая многие профессиональные инклинометры.
Включение направления по оси Z в слияние геомагнитных датчиков для борьбы с ошибками дрейфа гироскопа в 6-осевом алгоритме, обеспечивая долгосрочный стабильный выходной курсовой угол. Калибровка необходима для обнаружения магнитного поля.
Оснащен специальной схемой стабилизации напряжения, поддерживающей широкий диапазон 5-36 В, что облегчает подключение.
Элитный чип магнитного поля военного класса, разработанный для плавного восстановления после помех магнитного поля, обеспечивает бесперебойную работу.
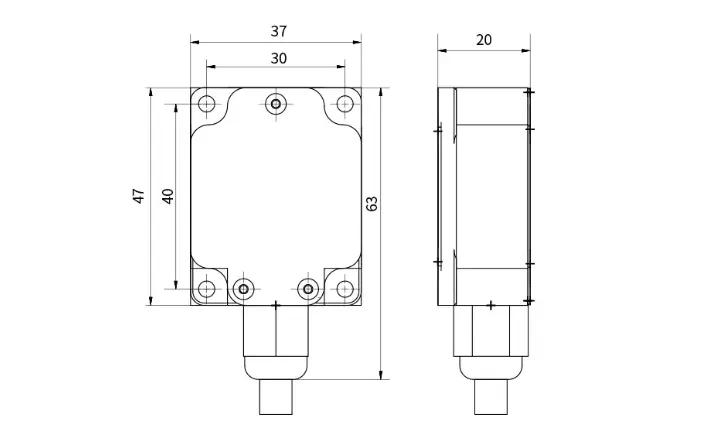
Защита уровня P67 и алюминиевый корпус обеспечивают надежную устойчивость к внешним электромагнитным помехам, обеспечивая безупречную работу в сложных промышленных условиях.
Параметры Акселерометра
| Параметры | Состояние | Типичное значение |
| Диапазон измерения | / | ±2г |
| Коэффициент разрешения | ±2г | 0.0000039(г/МЗП) |
| Статический дрейф нуля | Горизонтальное расположение | ±25мг |
| Температурный дрейф | -40°С ~ +125°С | ±0,1мг/℃ |
| Полоса пропускания | / | 5~256 Гц |
Параметры Гироскопа
| Параметры | Состояние | Типичное значение |
| Диапазон измерения | / | ±2000°/с |
| Коэффициент разрешения | ±2000°/с | 0,061(°/с)/(LSB) |
| Среднеквадратичный шум | Полоса пропускания = 100 Гц | 0,028~0,07(°/с)-СКЗ |
| Статический дрейф нуля | Горизонтальное расположение | ±0,5~1°/с |
| Температурный дрейф | -40°С ~ +85°С | ±0,005~0,015 (°/с)/℃ |
| Полоса пропускания | / | 5~256 Гц |
Параметры Магнитометра
| Параметры | Состояние | Типичное значение |
| Диапазон измерения | Значение счета циклов (200) | от -800 мкТл до +800 мкТл |
| Линейность ±200 мкТл | Значение счета циклов (200) | 0,60% |
| Коэффициент разрешения | Значение счета циклов (200) | 13нТ/LSB |
Параметры Угла Продольного И Поперечного Наклона
| Параметры | Состояние | Типичное значение |
| Диапазон измерения | / | X:±180° |
| Y:±90° | ||
| Точность наклона | / | 0,001° |
| Коэффициент разрешения | Горизонтальное расположение | 0,001° |
| Температурный дрейф | -40°С ~ +85°С | ±0,5~1° |
Параметр Угла Поворота
| Параметры | Состояние | Типичное значение |
| Диапазон измерения | / | От:±180° |
| Точность направления | 9-осевой алгоритм, калибровка магнитного поля, динамическая/статическая | 1°(Без помех от магнитных полей)【1】 |
| 6-осевой алгоритм, статический | 0,5°(Существует динамическая интегральная суммарная ошибка) | |
| 【2】 | ||
| Коэффициент разрешения | Расположить горизонтально | 0,0055° |
Примечание
【1】Произведите калибровку магнитного поля в тестовой среде перед использованием, чтобы убедиться, что датчик знаком с магнитным полем в окружающей среде. Во время калибровки, пожалуйста, держитесь подальше от магнитных помех.
【2】 В некоторых условиях вибрации могут возникать кумулятивные ошибки. Конкретные погрешности не могут быть оценены и зависят от фактических испытаний.