



01


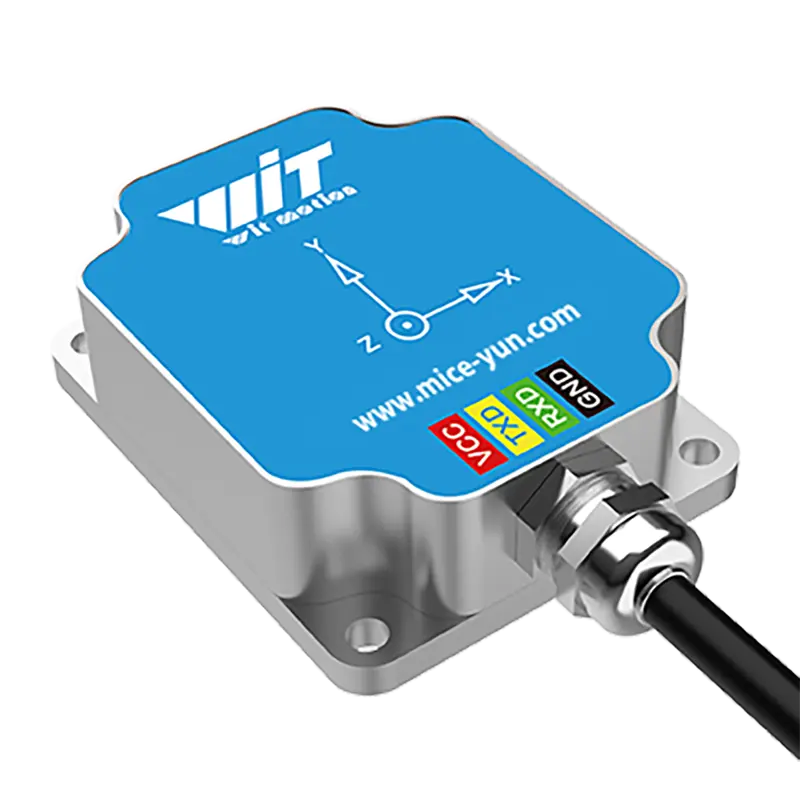
Микро Инерциальная Навигационная Система MEMS Встроенная Девять Оси Корабль Беспилотный Летательный Аппарат Авиационная Инерциальная Навигационная Система
Используя сложную технологию цифровой фильтрации, этот датчик эффективно устраняет шумы измерений, что значительно повышает точность измерений.
Оснащенный встроенным решающим устройством для определения ориентации, этот модуль в сочетании с динамическим алгоритмом фильтра Калмана с поразительной точностью определяет текущую ориентацию модуля в динамических условиях. Благодаря исключительной точности измерения ориентации в 0,2° и превосходной стабильности, его характеристики превосходят показатели некоторых профессиональных приборов для измерения угла наклона.
Благодаря включению курсового угла по оси Z в фильтр слияния геомагнитных датчиков, этот датчик эффективно решает совокупные ошибки, возникающие из-за интегрального дрейфа гироскопа в 6-осевом алгоритме, обеспечивая стабильный вывод данных курсового угла в течение длительных периодов времени.
Параметры Акселерометра
| Параметры | Состояние | Типичное значение |
| Диапазон измерения | / | ±16 г |
| Коэффициент разрешения | ±16 г | 0,0005 (г/LSB) |
| Среднеквадратичный шум | Полоса пропускания = 100 Гц | 0,75~1 мг-среднеквадратичное значение |
| Статический дрейф нуля | Горизонтальное расположение | ±20~40мг |
| Температурный дрейф | -40°С ~ +85°С | ±0,15 мг/℃ |
| Полоса пропускания | / | 5~256 Гц |
Параметры Гироскопа
| Параметры | Состояние | Типичное значение |
| Диапазон измерения | / | ±2000°/с |
| Коэффициент разрешения | ±2000°/с | 0,061(°/с)/(LSB) |
| Среднеквадратичный шум | Полоса пропускания = 100 Гц | 0,028~0,07(°/с)-СКЗ |
| Статический дрейф нуля | Горизонтальное расположение | ±0,5~1°/с |
| Температурный дрейф | -40°С ~ +85°С | ±0,005~0,015 (°/с)/℃ |
| Полоса пропускания | / | 5~256 Гц |
| Параметры магнитометра | ||
| Параметры Магнитометра | ||
| Параметры | Состояние | Типичное значение |
| Диапазон измерения | / | ±2Гаусс |
| Коэффициент разрешения | ±2Гаусс | 0,0667 мГаусс/LSB |
Параметры Угла Продольного И Поперечного Наклона
| Параметры | Состояние | Типичное значение |
| Диапазон измерения | / | X:±180° |
| Y:±90° | ||
| Точность наклона | / | 0,2° |
| Коэффициент разрешения | Горизонтальное расположение | 0,0055° |
| Температурный дрейф | -40°С ~ +85°С | ±0,5~1° |
Параметр Угла Поворота
| Параметры | Состояние | Типичное значение |
| Диапазон измерения | От:±180° | |
| Точность направления | 9-осевой алгоритм, калибровка магнитного поля, динамическая/статическая | 1°(Без помех от магнитных полей)【1】 |
| 6-осевой алгоритм, статический | 0,5°(Динамическая интегральная суммарная ошибка существует). | |
| 【2】 |
Примечание
【1】Произведите калибровку магнитного поля в тестовой среде перед использованием, чтобы убедиться, что датчик знаком с магнитным полем в окружающей среде. Во время калибровки, пожалуйста, держитесь подальше от магнитных помех.
【2】В некоторых условиях вибрации могут возникать кумулятивные ошибки. Конкретные погрешности не могут быть оценены и зависят от фактических испытаний.
Настройка GPS
| Указатель | Технические параметры |
| Прием сигнала | BDS/GPS/QZSS/ГЛОНАСС |
| Холодный старт TTFF | ≤32с |
| Горячий старт TTFF | ≤1с |
| Повторный захват TTFF | ≤1с |
| Чувствительность захвата холодного старта | -148 дБм |
| Чувствительность захвата при горячем старте | -156 дБм |
| Чувствительность повторного захвата | -160дБм |
| Чувствительность отслеживания | -162 дБм |
| точность позиционирования | <2,5м(КЭП50) |
| Точность измерения скорости | <0.1м/с(1с) |
| Скорость обновления местоположения | 2 Гц |
| протокол | NMEA0183 |
| Максимальная высота | 18000м |
| Максимальная скорость | 515м/с |
| Максимальное ускорение | 4г |
- Крупномасштабное автоматизированное сельскохозяйственное производство
- Беспилотники, пилотируемые самолеты
-Отслеживание/захват движения человека
- Роботы, автономные управляемые транспортные средства
- Навигация для пешеходов
- Беспилотное вождение/помощь при вождении
- Военное, интеллектуальное оружие и оборудование